2月28日人类使用手的所有表面进行接触丰富的操作
人类使用手的所有表面进行接触丰富的操作。相比之下,机器人手通常只使用指尖,这会限制灵活性。在机械工程与材料科学与计算机科学教授 Aaron Dollar 实验室的一项新研究中,研究人员采用非传统方法为机器人手创建新设计。
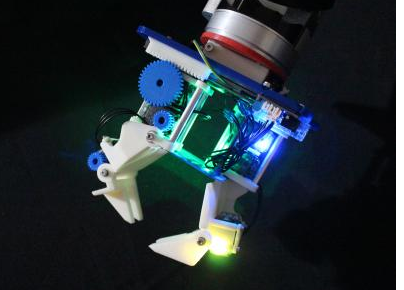
研究小组——研究生沃尔特·伯彻和安德鲁·摩根,以及美元——设计了一只两指灵巧的手。它被称为“模型 W”,其灵感来自人类手部动作和机器人笼子抓握中所见的高度灵巧——一种用于松散地夹在手指之间的物体的策略,防止物体弹出,同时允许一些自由运动发生。为了使该设计成为机器人操作社区中其他人的有用工具,研究人员使该设计相对简单,并且组件便宜。他们还通过 Yale OpenHand(一个开源机器人手硬件计划)发布了该设计。
在这里,主要作者 Bircher 解释了这项工作及其意义:
告诉我们这个项目的背景,以及你是如何涉足这个领域的。
近 50 年来,人们一直在设计灵巧的机械手,但还没有达到与人类手相同的灵巧程度。这部分是因为人手经常与物体建立和断开接触并利用手的所有表面,这些技能是机器人手难以模仿的。甚至在几十年前,就已经注意到在手指和物体之间使用滚动和滑动接触来提高灵活性的优势,而突出的操纵模型只考虑了固定接触。在这项工作中,我们描述了一个允许滚动、滑动和固定接触的模型,从而能够设计出高度灵巧的机器人手。
在 NASA 喷气推进实验室的机器人操作小组实习后,我在大学期间对机器人手操作产生了兴趣。我跟着这种兴趣来到耶鲁大学,在美元集团攻读博士学位。我们小组通常对优化驱动不足和机械简单的机械手的效用感兴趣。带着这种心态,我开始对设计如何提高简单手的操作能力产生兴趣,尤其是在利用手和物体之间的非持久接触(滚动和滑动)时。
这项工作有什么意义?
一般来说,机械手在不掉落物体的情况下滚动或滑动物体的能力有限,这限制了它们在动态的人类环境中的实用性。这项工作提供了一种新方法来扩展简单手的灵活性,而不需要传统模型的复杂数学运算,这可以使机器人手用于家庭环境、工作场所和其他需要灵巧、类似人类的操作的情况. 我们的手,W 型,展示了一种自由形式操作的例子,它在不断变化的日常环境中很有用,并且向机器人与工具、物体甚至人的交互迈出了一步。
谁可能不同意这一点?
一些研究人员以一种在操作时跟踪所有接触力、摩擦、物体位置等的方式对操作进行建模,从而可以计算抓握的稳定性,避免物体弹出。然而,这种方法可能具有挑战性,因为难以准确测量物体接触位置以及力的大小和方向,并且摩擦系数会随着时间而变化。在我们的方法中,我们只考虑封闭和系统的整体能量。有些人可能认为这种方法“更混乱”,因为它提供的关于手物体接触性质的信息不太精确。然而,通过利用自由形式的接触并确保物体锁定,我们实现了高灵活性和低物体弹出风险,这使得这是一种有利的方法。
这些发现中最令人兴奋的部分是什么?
过去,我们使用现有机器人手的能量图来评估它们的能力并控制它们对物体的操作,但从未使用能量图来设计全新的手。因此,经过大量的理论建模和工程来构建 Model W,看到它第一次操纵物体并确认它可以像理论预测的那样运行,真是令人兴奋。尤其令人兴奋的是,Model W 在执行各种任务时表现出非常高的成功率,这表明锁定策略可靠地防止了物体弹出并产生了可靠的灵巧手。
对于您或其他研究人员,下一步是什么?
Model W 专为平面 (2D) 操作而设计,但许多任务需要空间 (3D) 操作。因此,我们未来工作的一个目标是将这个模型扩展到三个维度,并生产出更通用的灵巧手。我们还在努力扩展能量图模型以创建用于实时控制的闭环控制器,这将需要优化模型的计算效率。我们希望使用能量图可以改进这项工作中显示的基本控制策略,通过更精确地引导手中的电机来实现物体的所需运动。此外,我们希望其他研究小组在他们自己的工作中利用我们的理论,并使用 Model W 作为测试操纵策略的平台。