新型机器人可以使用合成蝙蝠耳来精确定位声源
2021-04-22 08:55:07
•
来源:
导读 在机械工程学教授罗尔夫·穆勒(Rolf Mueller)的带领下,弗吉尼亚理工大学的一组研究人员开发了一种受蝙蝠启发的新技术,以帮助机器人准确
在机械工程学教授罗尔夫·穆勒(Rolf Mueller)的带领下,弗吉尼亚理工大学的一组研究人员开发了一种受蝙蝠启发的新技术,以帮助机器人准确地确定声音的起源。该团队希望其新技术将改善用于农业,环境监控以及国防和安全领域的机器人技术。
科学家和工程师将大多数声音定位技术基于人类的听觉,这是相对不准确的。人类依靠两只耳朵来确定声音的起源,准确度为9度,而蝙蝠可以使用两只耳朵中的任何一只来精确定位声音的一半。
人类和蝙蝠都通过多普勒效应来确定声音的起源,在这种现象中,当您接近或远离声源时,声音的频率(及其音高)会增加或减小(当您离开声源时,不会发生多普勒效应)。仅当您或声源正在积极移动时才保持静止)。由于蝙蝠耳不断地颤动和颤动,因此它们可以“扫描”声音的多普勒频移信号,并比人更精确地确定其位置。
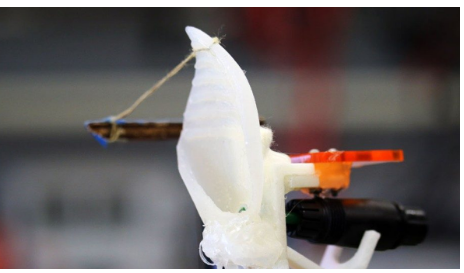
在最基本的层面上,新的声音定位技术是蝙蝠耳的复制品。罗尔夫·穆勒(Rolf Mueller)和他的团队精心制作了一种合成蝙蝠耳,它可以移动和颤动,将声音的多普勒信号传递给一个小型麦克风。然后,经过专门训练以解析多普勒频移信号的神经网络以令人难以置信的准确性确定了声音的起源。
到目前为止,由Rolf Mueller和Virginia Tech团队开发的声音定位系统完全依赖于蝙蝠的解剖结构。未来的改进可能会消除对合成蝙蝠身体部位的需求,但是我们很有可能会看到带有摆动的蝙蝠耳朵的自动机器人。
免责声明:本文由用户上传,如有侵权请联系删除!