多机器人任务期间自适应任务分配的框架
小编发现不少朋友对于 多机器人任务期间自适应任务分配的框架 这方面的信息都比较感兴趣,小编就针对 多机器人任务期间自适应任务分配的框架 整理了一些相关方面的信息 在这里分享给大家。
近年来,机器人变得越来越复杂,因此,它们现在能够完成各种各样的任务。虽然某些机器人被设计为可以单独工作,例如在人们的家中提供基本帮助,但其他机器人在团队中部署时可能会更高效。
在搜救任务中,例如在自然灾害之后,机器人可能会更有效地作为一个团队,因为它们可以提供物资或更快地搜寻幸存者,从而覆盖更大的地理区域。但是,为了最有效地完成团队任务,机器人应该能够很好地协作,并且可以有效地相互分配不同的任务。
考虑到这一点,佐治亚理工学院(Georgia Tech)的研究人员最近开发了一种在任务期间进行自适应任务分配的框架,该任务由一组机器人完成。在arXiv上预发表的一篇论文中介绍了它们的框架,可以根据其独特的功能和特点将任务分配给机器人。
“我们设想了机器人团队可以在动态环境中运行,并且本文提出了一条更新的规则,该规则使机器人能够了解自己在运行中分配给各种任务的适合程度,” Yousef A Emam之一进行这项研究的研究人员告诉TechXplore。
研究人员开发的框架基于他们在先前论文中介绍的异构多机器人系统的任务分配技术。这种先前设计的策略需要使用一种算法,该算法可以解决各个机器人功能的差异并相应地分配任务。这些任务的分配和执行同时进行。
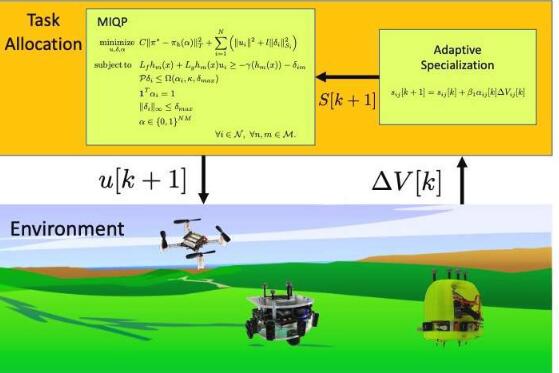
Emam说:“我们的框架在线解决了优化问题,告诉各个机器人如何优先考虑它们对要完成的各种任务的贡献(即任务分配),以及如何做到这一点(即任务执行)。”
在他们的研究中,Emam和他的同事基于他们先前开发的任务分配策略,使其对机器人周围环境的变化更加敏感。与以前的版本相比,他们的新框架不需要明确的环境模型或未知的机器人功能。相反,它主要考虑的是机器人团队在给定任务上取得的集体进步以及每个机器人在单独任务上的表现。
Emam解释说:“在我们最近的研究中,我们开发了一种反馈定律,使先前开发的框架能够适应环境干扰。” “这意味着即使机器人不完全了解其对每个任务的适应性,它也会在飞行中进行学习。”
研究人员通过一系列模拟评估了他们的框架,发现该框架取得了非常可喜的结果。在这些实验中,即使在部署前各个机器人的能力未知的情况下,他们的方法也可以在各种环境条件下在机器人之间进行有效的任务分配。
将来,由Emam和他的同事开发的任务分配和执行框架可以增强以团队形式部署的机器人之间的合作,从而提高他们的集体绩效。这最终可以促进在搜救任务中大规模动员机器人。
Emam说:“我们目前正在努力扩展框架,使其包含每个机器人的功能(例如传感器,致动器),以便我们可以更明确地在线模拟功能故障。” “此外,我们正在研究的另一方面是机器人(分散式)之间的计算分配。”