Alphabet X的新Everyday Robot项目希望建立可以向周围世界学习的机器人
今天,Alphabet的X moonshot部门(以前称为Google X)启动了Everyday Robot项目,该项目的目的是开发“通用学习机器人”。该想法是,其机器人可以使用相机和复杂的机器学习算法来观察和观察。向周围的世界学习,而无需为每个动作编码。
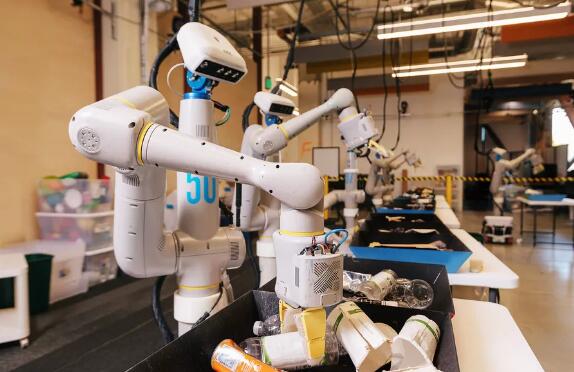
该团队正在测试可以在工作场所环境中提供帮助的机器人,尽管现在,这些早期的机器人专注于学习如何分类垃圾。这是其中的一个样子-它让我想起了一个非常高大的单臂Wall-E(具有讽刺意味,鉴于机器人的任务是做这件事)。
掌握某种东西的概念对于大多数人来说很容易实现,但是教机器人是一件非常具有挑战性的事情,每天机器人的机器人都可以在物理世界和虚拟世界中实践。在参观X的办公室时,Wired描述了近30个机器人的“游戏围栏”(在人类的监督下)如何在白天将垃圾分类到托盘中以进行堆肥,垃圾填埋和回收利用。据Wired称,到了晚上,Everyday Robot让虚拟机器人练习在模拟建筑物中抓取东西。然后,将模拟数据与真实世界数据进行组合,该数据每两周会在系统更新中提供给机器人。
通过所有这些实践,X表示机器人实际上已经非常擅长分类,显然将不到5%的垃圾放在错误的位置(X的人将20%的垃圾放在错误的堆中,根据X的说法)。
但是,这并不意味着他们已经准备好替换人工看门人。《连线》杂志观察到一个机器人抓住稀薄的空气而不是前面的碗,然后试图放下“碗”。在演示过程中,另一个人失去了一只“手指”。工程师还告诉《连线》,有一点,有些机器人没有穿过建筑物,因为某些类型的光线导致它们的传感器使地板上的孔产生幻觉。
整个初创公司都致力于教授机器人如何掌握问题,例如EmbodiedIntelligence和非营利组织OpenAI。同样由Alphabet拥有的Google已对抓握进行了研究-观看2016年这段视频,其中介绍了一些Google制造的机械臂试图抓住尺寸不同的物体。
尽管进行了所有这些研究,但Google和Alphabet在机器人技术方面的历史一直困扰着人们。Google在机器人技术上的最后一次认真尝试始于2013年,该团队由Android联合创始人安迪·鲁宾(Andy Rubin)领导。尽管该部门进行了一些引人注目的收购,包括波士顿动力(Boston Dynamics),但并没有得到具体的证实,鲁宾在遭到性骚扰指控后于2014年离开了Google。不过,根据今年3月的一份报告,Google显然将重心投向了机器人技术,其新型机器人也正在学习如何抓取机器人,但是Google的工作似乎与Everyday Robot的工作不同。
每天,机器人负责人汉斯·彼得·布隆德莫(Hans Peter Brondmo)告诉《连线》,他希望有一天能制造出一种可以帮助老年人的机器人。但是他也承认类似的东西可能还需要几年的时间,所以目前看来,机器人在分类垃圾方面会越来越好。