研究人员开发出靠磁力飞行的微型机器
Paul Scherrer研究所PSI和ETH Zurich的研究人员已经开发出可以执行不同动作的微机。首先对微型机器人组件中的纳米磁铁进行磁编程,然后通过磁场控制各种运动。这样的机器,只有几十微米宽,可以例如在人体中用于执行小的操作。
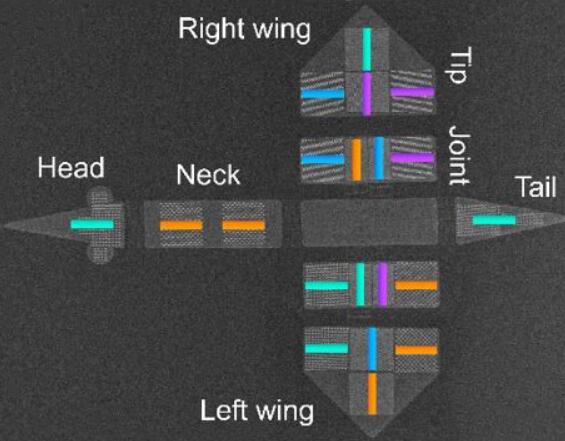
该机器人的尺寸仅为几微米,让人联想到日本折纸艺术-用折纸制成的纸鸟。但是,与纸质结构不同,机器人在没有可见力的情况下仿佛靠魔术般运动。它拍打翅膀或弯曲脖子并缩回头部。磁性使这些动作全部成为可能。
Paul Scherrer研究所PSI和ETH Zurich的研究人员已经用包含小型纳米磁铁的材料组装了微型机器。可以对这些纳米磁铁进行编程,使其呈现特定的磁性方向。然后,将编程的纳米磁铁暴露在磁场中时,特定的力就会作用在它们上。如果这些磁体位于柔性组件中,则作用在它们上面的力会导致组件移动。
纳米磁铁可以一次又一次地编程。这种重新编程会产生不同的力,并产生新的运动。为了建造微型机器人,研究人员在氮化硅薄板上制造了钴磁铁阵列。用这种材料制成的鸟可以执行各种动作,例如拍打,盘旋,转身或侧滑。研究人员现在将其结果发表在科学杂志《自然》上。
PSI多尺度材料实验实验室负责人,苏黎世联邦理工学院介观系统教授Laura Heyderman说:“微型机器人执行的运动在几毫秒内发生。”“但是纳米磁铁的编程只需要几纳秒。这样就可以依次编程不同的运动。这意味着微型小鸟可以先拍打翅膀,然后滑到侧面,然后再拍打。海德曼说:“如果需要,那只鸟也可以在它们之间盘旋。”
智能微型机器人
这个新颖的概念是迈向微型和纳米机器人的重要一步,不仅可以存储信息以执行特定的动作,还可以对其进行重新编程以执行不同的任务。苏黎世联邦理工学院机器人与智能系统研究所的布拉德利·纳尔逊解释说:“可以想象,将来,一个自主的微型机器将在人体血管中导航并执行诸如杀死癌细胞的生物医学任务。”也可以考虑其他应用领域,例如,改变其光学特性的柔性微电子器件或微透镜。
另外,表面特性改变的应用也是可能的。“例如,它们可以用于创建可以被水润湿或排斥水的表面”,介观系统实验室的工程师兼研究员Jizhai Cui说。