在室内环境中增强机器人导航的新方法
为了有效地导航周围环境,机器人通常根据预先设计的运行环境和传感器收集的观测结果来规划路径。虽然这种导航策略在简单和静态的环境中很有用,但在更复杂和不可预测的策略(例如在现实世界中发现的策略)中却远非理想。
实际上,即使馈送给机器人的地图经过精心编译且准确无误,也无法解决意料之外的障碍或环境变化。由于大多数最终应在其中部署机器人的环境(例如医院,购物中心,机场等)都是高度不可预测且瞬息万变的,因此主要依赖于预先设计的地图的导航方法可能会导致轨迹和导航策略不佳。
意识到这一问题,波恩大学的两名研究人员最近开发了一种方法,该方法可以使机器人在更长的时间内更有效地导航迅速变化的室内环境。在arXiv上预先发表的一篇论文中提出的这种新方法实质上是通过捕获环境变化方式的重复模式并利用此知识来做出明智的导航决策而起作用的。
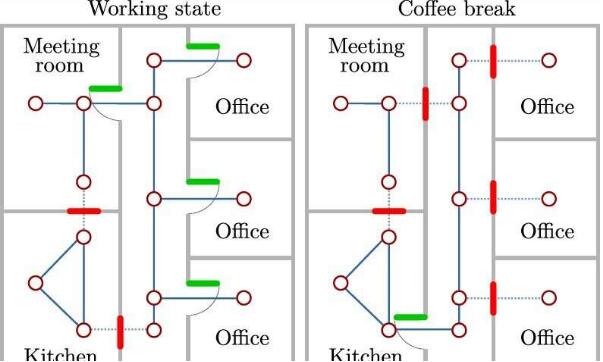
进行这项研究的研究人员之一洛伦佐·纳尔迪(Lorenzo Nardi)告诉TechXplore表示:“这项研究的想法是,室内空间的许多变化都是在重复空间模式之后发生的,例如门同时打开和关闭。”“在这些环境中部署了较长时间的机器人可以观察并不断收集有关它的信息,并利用这些知识来计划更好的导航策略。”
在先前的研究中,同一研究人员开发了一种方法,该方法收集有关地形如何影响机器人在户外导航的信息,然后使用它来计算轨迹,以最大程度地减小机载振动和功耗。在他们的新研究中,他们决定通过预测环境随着时间的推移所采用的不同配置,专注于室内机器人导航。
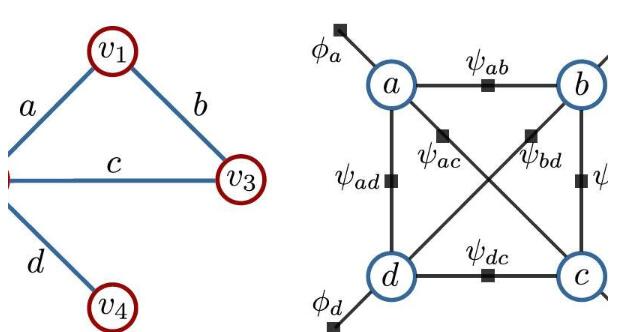
研究人员在工作中使用的示例拓扑(左)和概率图形模型(右)。
他们开发的方法旨在通过对动态环境变化的模式进行建模并利用此信息来规划机器人的路径来增强机器人的室内导航。因此,使用机器人的方法,机器人在到达指定位置的路径上会遇到较少的障碍和阻塞的通道。
Nardi解释说:“我们方法的主要优点是它考虑了一种能够连续整合有关环境的新观察结果的环境表示。”“与基于环境的静态几何图的贪婪的最短路径规划者相比,这种表示方式可以随时间规划更好的轨迹。”
研究人员通过将其应用于四种不同室内环境中的一系列场景来评估他们的方法:小型办公室,中型办公室,大型办公室和医院。在这些实验中,他们的方法表现出色,计划了考虑环境变化的有效路径。此外,他们将他们的方法与基于静态地图的现有技术进行了比较,发现当机器人部署时间更长时,它会生成更短和更好的路径。
Nardi说:“我们的发现表明,尽管导航系统的复杂性有所增加,但我们的方法会逐步引导机器人提供有关环境配置的准确预测,并利用这些知识沿较短的路径导航。”
将来,Nardi和他的同事Cyrill Stachniss提出的方法可能有助于在快速变化的室内环境中增强机器人导航。在医院等对机器人效率至关重要的环境中,它可能特别有用。研究人员现在计划使用一个实际的机器人平台来测试他们的方法,因为这最终将使他们能够评估他们收集的最初发现是否仍然适用于现实生活中。
Nardi说:“未来研究的另一个有趣的方向可能是尝试将高频动态行为(例如其他移动的动态主体)整合到框架中。”