由smarticle构建的变形机器人显示出新的运动策略
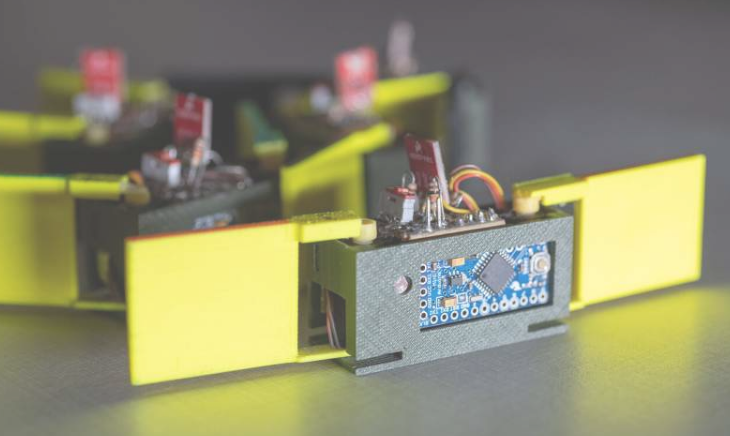
建造传统机器人通常需要仔细组合电机,电池,执行器,车身部分,支腿和车轮等部件。现在,研究人员采用了一种新的方法,完全用称为“智能手机”的小型机器人构建机器人,以解开潜在的新运动技术的原理。
3D智能活性颗粒的三维印刷智能芯片可以做一件事:拍打他们的两只手臂。但当这些智能体中的五个被限制在一个圆圈中时,它们开始相互推动,形成一个被称为“超级运动”的物理系统,它可以自行移动。添加光或声音传感器允许超级运动响应刺激而移动 - 甚至可以控制得足以导航迷宫。
现在虽然很简陋,但是从小型机器人制造机器人的想法 - 并利用个人组合产生的群体能力 - 可以提供基于机械的控制非常小的机器人。最终,该组的紧急行为可以为可能改变形状的小型机器人提供新的运动和控制方法。
“这些是非常基本的机器人,其行为主要是力学和物理定律,”佐治亚理工学院物理学院Dunn家庭教授Dan Goldman说。“我们不打算对它们进行复杂的控制,传感和计算。随着机器人变得越来越小,我们将不得不使用力学和物理原理来控制它们,因为它们不具备计算和感知的水平。需要传统控制。“
建造传统机器人通常需要仔细组合电机,电池,执行器,车身部分,支腿和车轮等部件。现在,研究人员采用了一种新的方法,完全用称为“智能手机”的小型机器人构建机器人,以解开潜在的新运动技术的原理。图片来源:Georgia Tech
该研究得到了陆军研究办公室和国家科学基金会的支持,计划于9月18日在“科学机器人”杂志上发表。西北大学的研究人员也为该项目做出了贡献。
研究的基础来自一个不太可能的来源:对建筑主食的研究。通过将这些重型订书钉倒入具有可拆卸侧面的容器中,前博士学位。学生尼克·格拉维什(Nick Gravish)现在是加利福尼亚大学圣地亚哥分校创建的一个教职员工,他们在拆除集装箱的墙壁后自立。
摇动钉塔最终导致它们坍塌,但观察结果表明,机械物体的简单纠缠可以创造出具有远远超出单个部件能力的结构。