磁铁给这个机器人一个柔软的触感
2021-03-06 09:08:25
•
来源:
导读 人类的手在操纵一系列物体方面非常熟练。我们可以拿起鸡蛋或草莓而不会砸碎它。我们可以敲钉子。
允许我们执行各种任务的一个特征是能够改
人类的手在操纵一系列物体方面非常熟练。我们可以拿起鸡蛋或草莓而不会砸碎它。我们可以敲钉子。
允许我们执行各种任务的一个特征是能够改变我们抓地力的坚定性,布法罗大学的工程师开发了一种双手机器人手,分享这种特性。
机器人手的设计使其能够在碰撞期间从冲击中吸收能量。这可以防止机器人手中的任何东西断裂,并且还可以使人们更安全地在机器附近工作。
UB工程与应用科学学院机械与航空航天工程副教授Ehsan Esfahani博士说,这种夹具将成为汽车,电子封装和其他行业装配线中人机协作的宝贵资产。 。
“我们的机器人抓取器模仿人手的调整握把的刚度能力。这些把持器是专为与人一起工作协作机器人,” Esfahani说。“他们将成为帮助者,因此他们需要安全,并且可变刚度夹具有助于实现这一目标。”
9月10日在线发布在IEEE工业电子产品交易会上的一项新研究突出了该设备的安全设计,包括通过实验展示夹具的减震功能如何防止意大利面条在碰撞过程中破裂。
磁铁给这个机器人一个柔软的触感
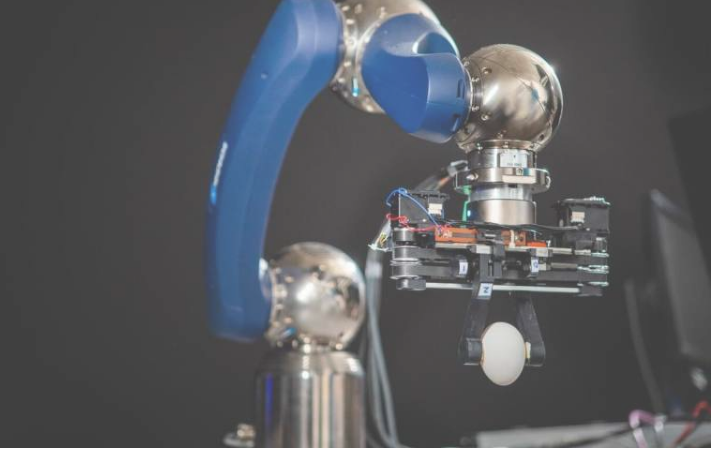
Esfahani解释说,磁铁是机器人抓手多功能性背后的秘密。
不是将两个手指固定在适当位置,每个抓手的手指都有一个磁性底座,位于两个钕磁铁之间,可以排斥或推动手指。
磁铁之间的气隙就像一个弹簧,当手拿起物体或与外力碰撞时产生一点点给予。还可以通过增加或减小磁体之间的间距来调节手柄的刚度。
在新的论文中,Esfahani和Amirhossein Memar,前UB博士。机械和航空航天工程的候选人,报告这些安全功能。
在一组测试中,工程师在机器人手的指间之间纵向放置了一小块意大利面条。当夹具撞入固定物体时,该装置检测到施加的外力,这使得磁铁调整其位置,暂时降低夹具的刚度并允许夹具吸收碰撞产生的一些能量。
免责声明:本文由用户上传,如有侵权请联系删除!