这种超级机器人抓手收集脆弱的海洋生物
深处的生物生活在一个非常不同的世界 - 一个致命的我们。但是我们的世界对他们来说也是致命的,所有锋利的边缘和快速的运动。如果我们要抓住并了解深层柔软的居民,我们的机器也必须柔软 - 这就是哈佛大学机器人研究的全部内容。
从深海采集样本是一项艰难的任务:虽然这些动物的压力和温度远远超过任何表面生物可以处理的程度,但它们很容易因处理而受损。收集它们用于研究的现有方法通常涉及将它们吸入小容器中,所述容器保持加压并带到表面。但是能够抓住一个有趣的生物并在体内检查它会很好,不是吗?
为此,哈佛大学Wyss研究所的研究人员我们一直在研究更简单,更安全的方法来暂时捕获这些生物,让它们在收集器获得一些好的图像或(我不知道)取样一些粘液后几秒钟或几分钟后走。
一年多以前,他们创造了一种“水下神奇球”,一种柔软的短程线形状,可以封闭像果冻或漂流鱼这样的东西。但即使采用这种方法,它仍有可能在关闭期间被压扁。
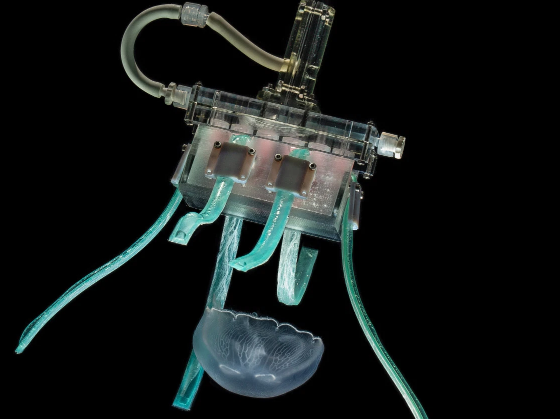
所以他们继续他们的工作,而不是“面条状的附属物”,当没有被激活时,就像煮熟的意大利面条,或者更确切地说是意大利宽面条一样柔软无害,考虑到它们的形状。
每个“手指”都由“弹性但坚韧的硅树脂基质”制成,里面是微小的纤维,在不使用时保持松弛,但可以使用微量的液压加固。这导致整个手指在特定方向上弯曲,在这种情况下与其他方向同时向内弯曲,将其范围内的任何东西舀入柔软的3D打印“手掌”中。手柄足够柔软以至于不会伤害这个生物,但又足够坚定,不能只是蠕动。
在这一点上,研究人员可以自由地做他们想做的事情,虽然大概是在采取这样的照顾以便不受伤害地抓住动物之后,他们不会做任何过于粗暴的事情。
手指的大小或长度几乎没有限制,这意味着它们可以针对不同的操作进行定制。您所看到的设备可以有效地捕捉常见的果冻,但整个过程可以很容易地按比例放大或缩小以处理更大或更小的动物。
当然,整个东西可以附加到潜水器上,但它足够小而且非常简单,它也可以制成手持式小工具,用于手动取样,如果是特定研究人员喜欢的话。他们整理了一个原型并“展示了这款手持式软夹具的使用,成功地对三种规范的水母物种进行了轻柔的抓取。”
这里希望这意味着我们海洋中的果冻更少,也许有一天你可以在浮潜时租用这样的抓取器,并有机会仔细检查脆弱的海洋生物,而不必用手抓住它(不推荐)。
研究人员的工作今天发表在“科学机器人”杂志上。