哈佛的机器人手指非常适合捕捉水母
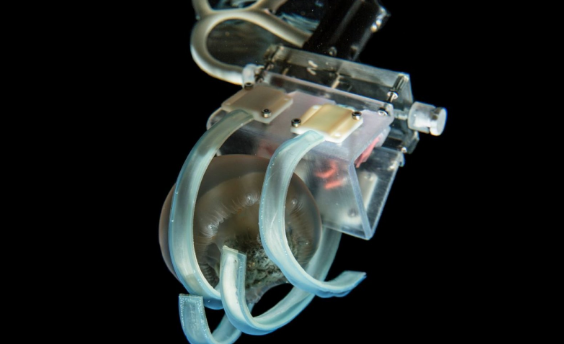
机器人可能有点笨手笨脚。当他们在仓库中移动箱子时,他们强有力的抓地力可能不是问题,但是他们可以破坏脆弱的海洋生物,如水母。研究人员可能有一个解决方案。他们创造了一个机器人手,带有柔软的抓取器和轻柔的握把,使用“类似fettuccini的硅胶手指”来捕捉和释放脆弱的凝胶状水母。
水母含有约95%的水分,其余5%的水分非常脆弱。目前,用于在其自然栖息地捕获水母的大多数工具都是为海洋石油和天然气工业开发的,当它们试图捕获它们时,它们经常将水母切成碎片。相比之下,这些有趣的硅胶“手指”用水充气并使用液压,这有助于使它们更加温和。根据研究人员的说法,它们施加的压力不到人类眼睑对眼睛施加压力的十分之一。
该设备由哈佛大学威斯研究所和纽约市立大学巴鲁克学院开发。研究人员今天在Science Robotics上分享了他们的发现。他们指出,水母已经引发了重要的发现,如科学家用于研究基因表达的绿色荧光蛋白(GFP)。有些人认为他们可以教我们如何对抗衰老。
水母可能不喜欢被手指刺痛,但它们在这个过程中并没有受到伤害。研究人员测试了新英格兰水族馆的夹子,在那里他们抓住游泳月亮果冻,果冻脂肪和斑点果冻 - 所有这些都与高尔夫球的大小有关。据说,水母没有表现出压力的迹象,夹子在出现磨损迹象之前能够打开和关闭约100次。与意大利面条相比,这对于某些东西来说非常好。
这项技术还可以帮助研究人员收集和研究其他海洋生物,它可以推进其他软机器人。我们已经看到了那些用于太空探索和医疗保健的设备,由热和气压等方法引发。“软机器人技术是解决各种领域长期问题的理想解决方案,因为它采用了灵活的材料,将传统机器人的可编程性和坚固性与前所未有的温和性相结合,”Rob Wood博士说道。 - Wyss Institute的Bioinspired Soft Robotics平台。