麻省理工学院猎豹机器人登陆跑步跳跃
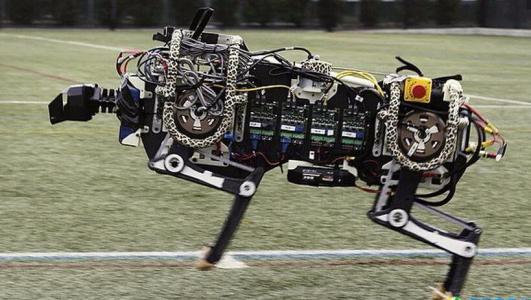
在机器人开发的飞跃中,建造机器人猎豹的麻省理工学院的研究人员现在已经训练它在跑步时观察和跳过障碍 - 这使得它成为第一个自主运行并跳过障碍物的四足机器人。
麻省理工学院的研究人员训练他们的机器人猎豹在跑步时观察并跳过障碍 - 使其成为第一个自主运行和跳过障碍物的四足机器人。为了获得跑步,机器人计划出它的路径,就像人类跑步者一样:当它检测到接近的障碍时,它会估计物体的高度和距离。机器人测量跳跃的最佳位置,并在施加足够的力量向上推动之前调整其跨越障碍物的步幅。根据障碍物的高度,机器人然后在恢复其初始速度之前安全地施加一定量的力量着陆。
在跑步机和室内跑道上的实验中,猎豹机器人成功地清除了高达18英寸高的障碍物 - 超过机器人自身高度的一半 - 同时保持平均运行速度为每小时5英里。
“跑跳是一种真正的动态行为,”麻省理工学院机械工程助理教授Sangbae Kim说。“你必须管理平衡和能量,并能够在着陆后处理影响。我们的机器人专为那些高度动态的行为而设计。“
Kim和他的同事 - 包括研究科学家Hae赢得Park和博士后Patrick Wensing--将在6月份的DARPA机器人挑战赛中展示他们的猎豹跑步,并将在7月的Robotics:Science and Systems会议上发表一篇详细介绍自动系统的论文。
看,跑,跳
去年9月,该小组证明了机器人猎豹能够不受限制地运行- 这是Kim注意到机器人在没有使用相机或其他视觉系统的情况下进行“盲目”的壮举。
现在,机器人可以“看到”,使用机载激光雷达 - 一种使用激光反射来绘制地形的视觉系统。该团队根据LIDAR数据开发了一个三部分算法来规划机器人的路径。视觉和路径规划系统都在机器人上,使其完全自主控制。
该算法的第一个组件使机器人能够检测到障碍物并估计其大小和距离。研究人员设计了一个公式来简化视觉场景,将地面表示为直线,将任何障碍物表示为与该线的偏差。使用此公式,机器人可以估计障碍物的高度和距离自身的距离。
一旦机器人检测到障碍物,算法的第二部分就会启动,允许机器人在靠近障碍物的同时调整其进近。根据障碍物的距离,算法预测跳跃的最佳位置,以便安全地将其清除,然后从那里回溯到机器人剩余步幅的空间,加速或减速以达到最佳起跳点。
这种“进近调整算法”可以在运行中运行,每一步都可以优化机器人的步幅。优化过程大约需要100毫秒才能完成 - 大约是单步速度的一半。
当机器人到达起飞点时,算法的第三个组成部分接管以确定其跳跃轨迹。根据障碍物的高度和机器人的速度,研究人员想出了一个公式来确定机器人的电动机应该在障碍物上安全地发射机器人的力量。该公式基本上提高了机器人正常边界步态所施加的力,Kim指出这基本上是“小跳跃的连续执行”。
最优是最好的,可行性更好
有趣的是,Kim说这种算法不能提供最佳的跳跃控制,而只是一种可行的跳跃控制。
“如果你想优化能源效率,你会希望机器人几乎无法清除障碍物 - 但这很危险,找到一个真正优化的解决方案需要花费大量的计算时间,”Kim说。“在跑步中,我们不想花很多时间来寻找更好的解决方案。我们只想要一个可行的。“
有时候,这意味着机器人可能跳得比它需要的要高得多 - 而且这没关系,Kim说:“我们太痴迷于最佳解决方案。这是一个你必须足够好的例子,因为你正在跑步,并且必须很快做出决定。“
该团队首先在跑步机上测试了麻省理工学院猎豹的跳跃能力,然后在赛道上进行了测试。在跑步机上,机器人拴在原地,因为研究人员将不同高度的障碍物放在腰带上。由于跑步机本身只有4米左右,机器人在中间运行,只有1米的距离来检测障碍并计划跳跃。多次运行后,机器人成功清除了大约70%的障碍。
相比之下,室内跑道的测试证明更容易,因为机器人有更多的空间和时间来观察,接近和清除障碍物。在这些运行中,机器人成功地清除了大约90%的障碍物。
金正日正在努力让麻省理工学院的猎豹在较软的地形上奔跑时跳过障碍,就像一片草地。